NASAと日産がつくる「神の目」を持つロボットカー

知っているだろうか。米航空宇宙局(NASA)が自動運転の実用化に取り組んでいることを。しかも2015年から組んでいるのは日産自動車。2017年には独自技術を使った「シームレス・オートノマス・モビリティ(SAM)」を発表。2018年には共同研究を拡大させた。自動運転は、まさに世界トップレベルの知見を巻き込み、急ピッチで開発が進められているのだ。そこで小沢コージ氏がサンフランシスコ湾下のニッサン・リサーチ・センター・シリコン・バレー(NRC-SV)に飛び、担当者を直撃した。
◇ ◇ ◇
長年、惑星探査の研究をしてきた
我々の前に姿を現したのは、いかにもアメリカンなカウボーイハットをかぶったNASA出身のリアム・ペデルセン博士と、コネクティビティーの専門家であり副所長でもあるグレゴリー・ディブ氏、そしてSAM開発のシニアマネージャーであるアーメル夏蘭氏。まずはディブ氏が概要を語ってくれた。
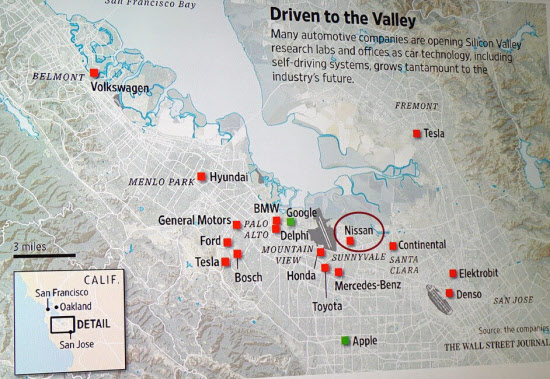
グレゴリー・ディブ氏(以下、ディブ) NRC-SVは2013年に開設され、現在自動運転、コネクテッド、ヒューマンインターフェース(HMI)、シームレス自動運転、ヒューマンセンターシステムの5つの開発テーマに取り組んでいます。シリコンバレーに拠点を置いている理由は、他にない人工知能(AI)技術のレベルの高さ、ユーザー体験などです。さらにメカニズムとAIの融合技術などがあるからです。メルセデスやBMW、フォルクスワーゲン、トヨタ、ホンダ、ヒュンダイなど、自動車産業に関連する世界中の企業が興味を持ち、集まっています
小沢コージ(以下、小沢) シリコンバレーにこないと自動運転はつくれないという感じなのでしょうか?
ディブ 自動運転技術において重要なのはスピード感。探検家のように素早く問題を見つけ、同時に解決可能なパートナーを探せること。それも長い時間をかけて完璧なものを作るのではなく、できたものから素早くテストできるのです。
小沢 そのためには時にライバルとも組むと?
ディブ さすがに競合との直接的な協業はありませんが(笑)、シリコンバレーですので時にそうしたことも起きます。シリコンバレーには「コーペティション(Co-opetition)」という、コンペティション(競争)とコーポレーション(一体)を合わせた言葉がありまして。
小沢 特殊なカルチャーがあるんですね。
ディブ さらに言うと公道テストがしやすいという実験環境があり、優秀な人材がいるということ。良い例がこのリアム・ペデルセン博士です。
小沢 まずNASAが日産と組んだと聞いてびっくりしました。いったいいつからなんですか?
リアム・ペデルセン博士(以下、ペデルセン) 計画が発表されたのは15年ですが、私が日産に来たのは5年前。その前は00年から10年間、NASAに所属していました。
小沢 何を担当していたのですか。
ペデルセン 現在、私の専門はクルマではなくロボティクスですが、NASAでは研究員として、惑星探索ロボットを開発していました。


始まりはなんとアポロ計画の時から
小沢 ま、マジですか! NASAが自動運転システムの開発を始めたのはいつぐらいで?
ペデルセン ロングヒストリーです。そもそも惑星で遠隔操作で動くロボットは、オートノマス(自動運転)である必要がありますから。
小沢 もしやアポロ計画の時代からですか。
ペデルセン そうです。例えば火星でロボットを動かすためには環境のセンシング(センサーなどを使用してさまざまな情報を計測・数値化する技術)が必要です。そのうえでその場で何をするかの意思決定を自ら行わなければなりません。それはロボットカーと全く同じなのです。
小沢 つまり現在つくっているのは自動運転カーではなく、ロボットカー?
ペデルセン そうです。ソフトウエア技術を入れることによって、いかにロボットカーを安全に運転させられるかが、私の責任になります。これは非常にエキサイティングなことで、例えばこの日産「リーフ」ベースのロボットカーはカメラを積んでいます。
小沢 たくさん見えます。


ペデルセン 基本的には日産が日本で開発しているリーフの自動運転実験車と同じなのですが、日本では比較的実車に近い研究をしているのに対し、我々は少し先を行く研究です。ソフトウエアの研究が進んでおり、ベースになっているのはNASAのVERVE技術です。そもそもは惑星探査中に、ロボットがAIで環境を認識し、障害物を自動で避けて走行するために開発されたシステムです。
小沢 つまりハードウエア以上にソフトウエアが重要ということですね。
人の判断が必要なシーンで登場するのがSAM
ペデルセン ところでロボットカーの一番の課題が何か分かりますか? 実はセンシングした膨大なデータを整理して、実際の意味を引き出すことなんです。データはそのままでは単なる数字ですが、その中に膨大な人間やクルマ、標識の情報が詰まっています。
小沢 その情報が「歩行者だ」「クルマだ」とコンピューターに教え込むのが大変なんですね?
ペデルセン さらに得た情報を見て、次にクルマに何をさせたらいいかの意思決定をさせる機能が、必要になります。人や障害物を避けるのは、実は比較的簡単です。難しいのはいかにクルマを社会的な存在にするか。例えば交差点の信号で止まったとします。すると周りの歩行者がいろんなジェスチャーで行きたい方向や意思を示したり、交差点でどのクルマが最初に白線で止まったのかを判断させることなどが問題になります。
小沢 信号のない交差点での優先順位なども理解する必要があるわけですね。
ペデルセン そうです。クルマは正常に道をぶつからずに走れるだけでなく、人や他車と社会的なやり取りを行わなければいけないのです。
小沢 その協調システムこそが日産が去年発表したSAM(シームレス・オートノマス・モビリティ)なんですね。

アーメル夏蘭氏(以下、アーメル) ここからは私がお話します。SAMの基本技術はNASAに昔からあったもので、例えばロボットは自律活動以上に、いかに人間と協調し、社会の中で役立つ行動ができるかが重要になります。そのためにはエンジニアだけでなく社会学者、人類学者、デザイナー、あらゆる人たちが集まってモビリティーのビジョンを確立する必要があります。
小沢 結構なヒューマニズムというか、文化的な理解が必要になるんですね。
アーメル それはロボットカーも同じで、毎日運転する交通環境の中では、人が理解できてもロボットカーには理解できないシーンが現れます。例えば工事現場で作業員を避けて運転しなければならない道があったとして、同時に信号機が上にあって赤や青になったとき、どちらを優先して運転すべきなのか。
小沢 すごく難しいですね。まさに社会的判断が必要かもしれない。
アーメル NASAは長い間データを集めてきましたが、こうした場面ではやはり人が何らかの指示を出す必要があります。それを行うのがSAMなのです。
小沢 いわば「神の目」だと。
アーメル 重要なのはすべての自動運転システムは人のためにあり、人との関係が最も重要だということです。将来的にモビリティーにはどういう未来があり、どういう意思決定システムが必要なのかを導き出すために、ロボットカーがたくさんのセンサーから得たデータからその意味を引き出し、それを「モビリティーマネージャー」が判断するということです。
小沢 ほとんどSF映画の世界だ。つまり繰り返すと日産が作っているのはロボットなんですね。映画『トランスフォーマー』みたいなことは起きますか?
アーメル もしかしたら(笑)。

自動車からスクーターから時計まで斬るバラエティー自動車ジャーナリスト。連載は日経トレンディネット「ビューティフルカー」のほか、『ベストカー』『時計Begin』『MonoMax』『夕刊フジ』『週刊プレイボーイ』、不定期で『carview!』『VividCar』などに寄稿。著書に『クルマ界のすごい12人』(新潮新書)『車の運転が怖い人のためのドライブ上達読本』(宝島社)など。愛車はロールスロイス・コーニッシュクーペ、シティ・カブリオレなど。

ワークスタイルや暮らし・家計管理に役立つノウハウなどをまとめています。
※ NIKKEI STYLE は2023年にリニューアルしました。これまでに公開したコンテンツのほとんどは日経電子版などで引き続きご覧いただけます。
関連記事





関連企業・業界







